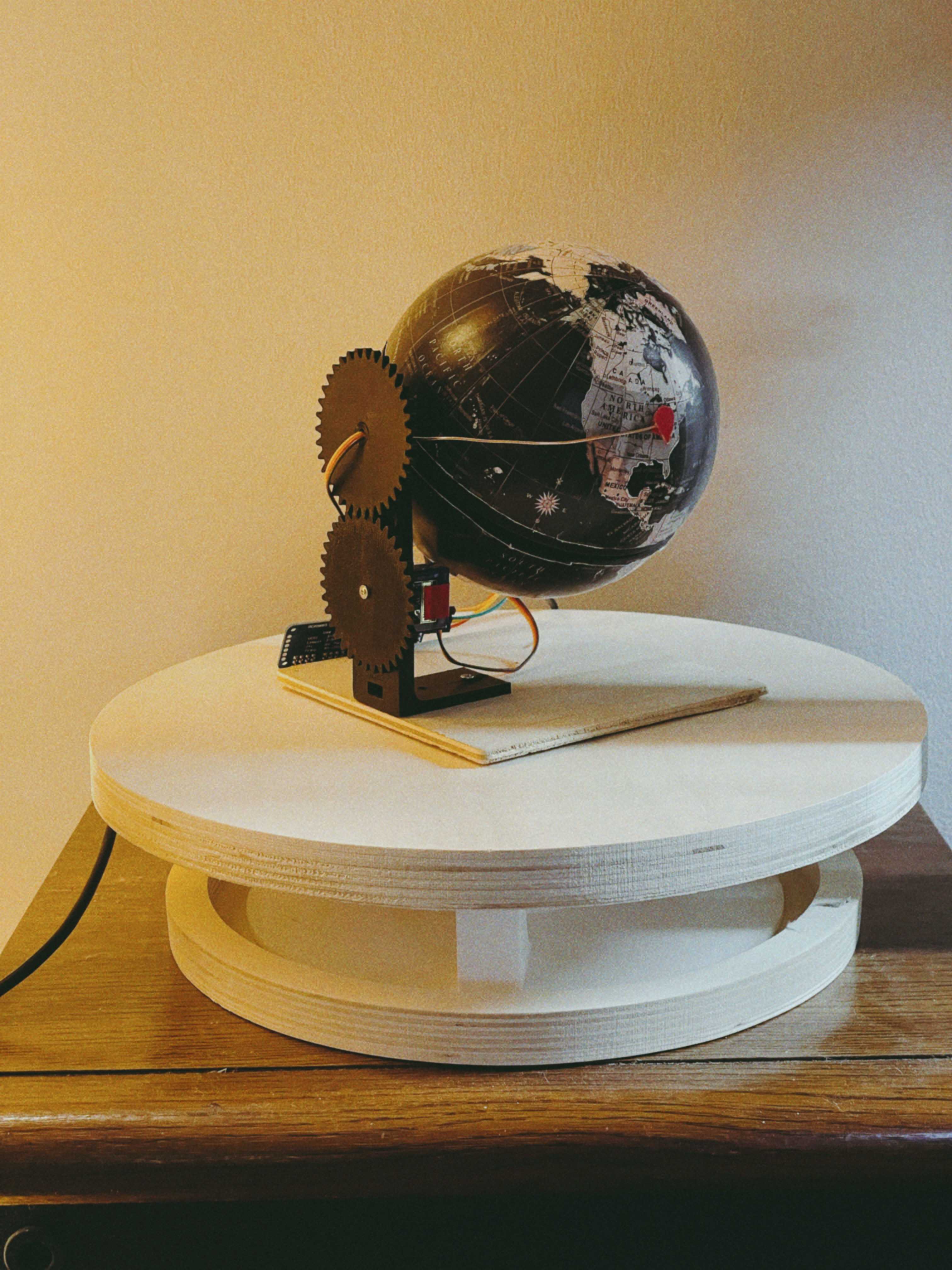
RoboGlobe is a two-axis robotic globe controlled by an ESP32 and a pair of micro servos. Send it a latitude and longitude over the network and the globe rotates to that location. One axis controls tilt, the other spins a full 360° through a geared rotation.
The system runs entirely locally. On first boot it creates its own Wi-Fi network for setup, then exposes a simple web endpoint for positioning. No cloud services, no accounts.
This is an early version. The mechanics, mapping, and software are still being adjusted as the project takes shape.